技术规格
推荐的系统配置
建议使用本地网络环境类型(如下图所示)。

- 智能手机会连接到5 GHz的Wi-Fi频段。
- 为避免干扰蓝牙,建议关闭无线路由器/接入点上的2.4 GHz频段。
- 将计算机防火墙设置为允许在mocopi PC连接设置中指定的UDP端口号(初始值:12351)接收数据。
- 接收多个虚拟形象的运动数据时,请使用不同的UDP端口号。
注意事项
各种使用条款适用于安装在本产品上或可与本产品一起使用的网络服务、内容和软件(包括操作系统)。请注意:网络服务、内容和软件提供可能无需通知而暂停或终止,或其内容可能会变更,或使用时可能需单独订阅或支付费用。
数据传输方法
| 互联网协议 | IPv4 |
|---|---|
| 通信协议 | UDP |
| 端口号 | 任意未使用的端口(初始应用值:12351) |
注意事项
- 指定IP地址时,请务必以IPv4格式设置地址。不支持“localhost”和IPv6格式。
- 假设mocopi将在本地网络中使用。因此,运动数据在传输过程中未加密。如果通过互联网传输数据,传输可能被拦截,数据可能泄露。
- 建议将运动数据未加密通知已创建应用程序的用户。
参考
发送和接收多个播放器的运动数据时,请针对各播放器使用不同端口号。
骨架定义(骨骼结构)
mocopi定义的骨架的骨骼结构如下。
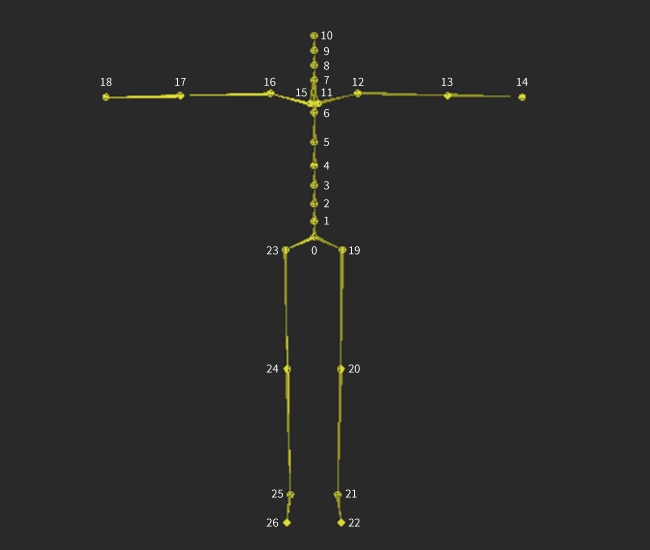
| 索引 | 关节名称 | 索引 | 关节名称 |
|---|---|---|---|
| 0 | root | 14 | l_hand |
| 1 | torso_1 | 15 | r_shoulder |
| 2 | torso_2 | 16 | r_up_arm |
| 3 | torso_3 | 17 | r_low_arm |
| 4 | torso_4 | 18 | r_hand |
| 5 | torso_5 | 19 | l_up_leg |
| 6 | torso_6 | 20 | l_low_leg |
| 7 | torso_7 | 21 | l_foot |
| 8 | neck_1 | 22 | l_toes |
| 9 | neck_2 | 23 | r_up_leg |
| 10 | head | 24 | r_low_leg |
| 11 | l_shoulder | 25 | r_foot |
| 12 | l_up_arm | 26 | r_toes |
| 13 | l_low_arm | ||